Recall that the most straightforward type of differential equation to solve is a linear, homogeneous equation.
Definition: The differential equation dy/dx = f(x, y) is said to be homogeneous if there exists a function g of one variable such that:
f(x, y) = g (y/x)
Example: dy/dx = ln x - ln y + (x + y)/ (x - y)
satisfies the definition. Why?
Well, because we can recast it in the form:
dy/dx = ln (x/y) + (1 + y/x) / (1 - y/x)
so that: g(w) = - ln w + (1 + w)/ (1 - w)
meeting the formal condition of the definition. The point is that any homogeneous equation can be reduced to a separable equation.
One can also solve systems of linear, homogeneous equations. To define homogeneous in this more complex situation, consider the system as shown below:
dx1/dt = a11(t)x1 + a12 (t)x2 + ..a1n(t)xn + f1(t)
:
:
dx2/dt = a21 (t)x1 + a22 (t)x2 + ..a2n (t)xn + f2(t)
:
:
dxn/dt = an1 (t)x1 + an2 (t)x2 + ..ann(t) xn + fn(t)
where the coefficients aij and the fi where the coefficients aij and the fi are functions continuous on a common interval, I.
When fi(t) = 0, and i = 0, 1, 2.......n, this system is said to be homogeneous. Otherwise, it is called non-homogeneous.
The key to solving such a system is that one can use matrix form to do so (recall past blogs on matrices, e.g. http://www.brane-space.blogspot.com/2012/01/positive-and-positive-definite-matrices.html) and in particular something called "the fundamental matrix".
If then, X1, X2....X3 is a fundamental set of solutions of the homogenous system:
X' = AX
on an interval, I, then its general solution on the interval is:
X = c1X1 + c2 X2 + .......+ c2 Xn
= c1[xi1j] + c2 [xi2j] + ...... cn [xinj]
where the brackets enfold row vectors
Now, let:
X1 = [xi1j] and X2 =[xi2j] and Xn = [xinj]
be a fundamental set of n solution vectors of the homogeneous system X' = AX on an interval I.
Then the matrix:
M(t) =
(x11.....x12........x1n)
(x21.....x22........x2n)
(xn1.....xn2........xnn)
is said to be a fundamental matrix of the system on the interval.
We want to proceed by solving the linear, homogeneous system:
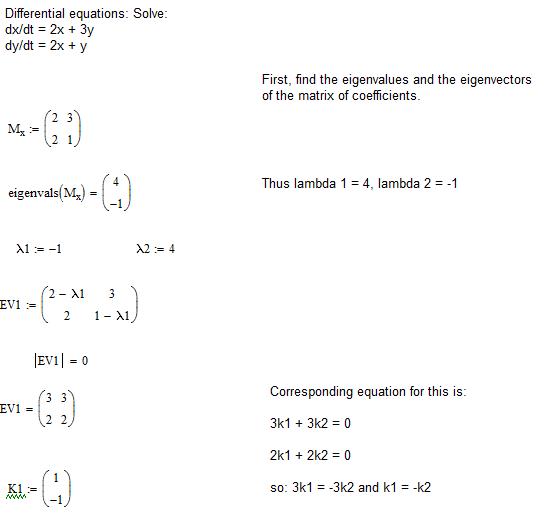
dx/dt = 2x + 3y
dy/dt = 2x + y
The steps to be followed are:
1) Find the eigenvalues from the matrix composed of coefficients
2) Having obtained the eigenvalues, obtain the first set of eigenvectors (EV1) as shown
3) Obtain the corresponding equation (in k1, k2) for the first set of (coefficient) "eigenvectors".
4) Thereby obtain the second eigenvalues and eigenvectors and the corresponding equations.
5) Find the primary eigenvectors K1 and K2 . (K1 and K2 are formed from k1 and k2)
6) Write the general solutions (X1, X2) in terms of K1, K2.
7) Thence, write the general solutions of the system, viz. X = c1 X1 + c2 X2
Problem:
Use the information provided in the graphic frame shown to complete the general solution. Hint: You should find in a succeeding step that K2 =
(3)
(2)
No comments:
Post a Comment